Brown's Distortion Model & How To Use It
The Brown distortion model/ Brown's Conrady model is basically a way to compensate for displacement of pixels in computer vision uses. Lens distortion is the appearance of a deformation that occurs on photos. In simple words, it is the phenomenon where curved lines come in place of straight lines on camera images. While sometimes distortion is an artistic expression and intended, it may also occur by error.
Lens distortion majorly occurs in two ways which include radial and tangential distortions.
Let's look keenly at the role of this model in solving camera distortion and what the main types of camera distortion entail.
Brown's Conrady Model and Software Correction
We can correct radial distortion using Brown's model, although the distortion has majorly low order radial parts.
The model is also applicable in correcting tangential or decentering distortion resulting from the imperfect alignment of the physical elements on a lens.
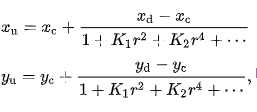
xu = x d + (xd – xc) (K1r2 + K2r4 + …) + (P1 [r2+ 2 {x d – x c}2] + 2P2 [xd– x c] [yd – yc]) (1 + P3r2+P4r4…)
yu = = yd + (yd – yc) (K1r2 + K2r4 + …) + (2P1[xd – xc] [yd – yc]+ P2 [r2 + 2{yd – yc}2]) (1 + P3r2 +P4r4…)
where:
yd and xd refer to the coordinates for the distorted points as they appear on an image plane
yu and xu represent the point of the undistorted image as it appears using a suitable pinhole camera
(xc, yc) is the distortion center
Kn represents the nth radial distortion coefficients
Pn is the coefficient for the nth tangential distortion
r is the square root of {x d – x c}2 + {yd – yc}2
... is an infinite series.
While pincushion distortion typically has a positive K1, barrel distortion has a negative value. The radial geometric series of mustache distortion features is non-monotonic in which for a particular value of r, the sign changes.
The division model offers more approximation accuracy than the even-order polynomial model by Brown when modeling Conrady radial distortion with the same previously defined conditions.
The Brown- Conrady model is less common when dealing with radial distortion due to its complexity. The above model is much preferred due to its simplicity when describing highly accurate severe distortion. A single term is adequate in modeling most cameras with the above model.
Warping an image in reverse distortion allows the software to correct the issues. The same involves identifying the displaced pixels corresponding with each undisplaced pixel on the distorted image. This is significant because of the distortion equation's non-linearity.
You can immensely reduce purple/ blue fringing (lateral chromatic aberration) with such warping applied separately to blue, green, and red.
Distorting and undistorting require either inversion of the linear problem or both assortments of coefficients. Linear Problem inversion typically has no analytical solution.
Standard solutions like iterative solvers, approximation, and locally linearizing are applicable. Your computational resources and the accuracy you want to determine which solvers are most suitable.
Lens Distortion
From the above model, we get to solve some types of camera distortion. So how do these distortions happen?
Different lenses experience distortion types depending on various extrinsic and intrinsic parameters, including the lens's length, focal length, subject distance, and more. Using a focus chart can reduce distortion. Generator your own custom patterns with our free online calibration pattern generator.
Radial Distortion
Radial distortion is one of the main categories of camera distortion. It occurs depending on your lens's design and profile. Occasionally, the distortion happens due to particular lens elements meant to prevent other visual problems like spherical aberrations.
We can further categorize radial distortion into three types:
- Pincushion distortion
- Barrel distortion
- Mustache distortion
These distortion effects consist of radial symmetry. They appear at the center of the focal length range and are severe at the ends of the wide-angle range in zoom lenses. At a certain distance from the principle, the degree of distortion is constant.
Barrel distortion occurs when your lenses deform inwardly and is more prominent in images from wide-angle lenses. On the other hand, pincushion distortion occurs when the camera distorts outwards. When both barrel and pincushion distortion occur on a single plane, you end up with handlebar distortion or mustache distortion. When the lens distorts inwards, this is called barrel distortion.
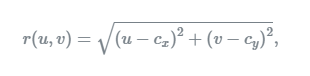
A single variable function r is adequate to describe the distortion effects given their radial symmetry. Taking your image coordinates to be v and u and cx, cy as the coordinate for the principle point, we can get r using the formula in which r (u, v) signifies the distance from the center of the image.
Various ideal radial lens distortion parametric functions are present today. Brown's even-ordered model is one of the most widely accepted.
qcorrected = (1 + K1r2 + K2r4 + K5r6). q
The Brown model uses three parameters K5, K2, K1. Being polynomially coefficient, they allow the presence of a smooth varying distortion. The distortion can be negative as in barrel, positive as in pincushion distortion, or both negative and positive, making that mustache distortion.
You only need to include even polynomial orders since the domain for the function is always positive (r∈ [0; rmax]).
Mathematically, pincushion and barrel distortion are quadratic. For this reason, they increase similarly to the square of their distance from the middle.
In handlebar distortions, the fourth degree (quartic) term is non-trivial: at the middle point, second-degree barrel distortion dominates while fourth-degree pincushion distortion is significant.
Other distortions can have pincushions in the middle with a barrel at the edges or higher-order distortions of the sixth and eighth-degree. Still, these are not typical scenarios in practical lenses. Moreover, higher-order distortions are smaller than the main pincushion and barrel effects.
Tangential Distortion
This distortion describes effects you cannot easily explain using a radial distortion model and its other name is prism distortion. This distortion can occur because of decentering, which is the improper alignment of various lens elements.
Another cause is the poor positioning of the optical axis on the sensor plane. Brown also proposed a model adequately able to fit the pixel distortion, as shown below:
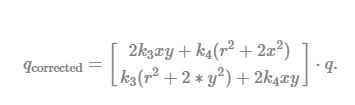
Combining the prism model with the radial distortion model brings about the Brown-Conrady model or Plumb Bob model.
It is often unnecessary to encompass prism distortion parameters within your camera model if you want good quality cameras and lenses.
Like radial distortion parameters and central point coordinates, a sizable number of properly distributed calibration photos are essential in the precise determination of these parameters and with good repeatability. Therefore, if your lenses and cameras are of adequate quality, it is better not to include them.
Leave A Reply